

| For Android: 3.0 | Guide: InertialNav cheats tutorial |
| When updated: 2022-10-11 | Star Rating: 0 |
| Name: InertialNav hack for android | Extension: Apk |
| Author: JTO | File Name: com.olympio.inav |
| Current Version: 0.3.12 | User Rating: Everyone |
| Downloads: 500-513 | Version: mod, apk, unlock |
| System: Android | Type: Education |


Watch Explore Model 580: Dual-Axis Control for Inertial Nav Systems video.

Watch 🛰️ How Inertial Navigation Systems Work | BorbonGeekery 🌐 video.

Watch Revolutionary Drone Technology: Rocket-Assisted Takeoff Explained video.

Watch Mastering Precision: Dual-Axis Thermal Inertial Nav Test Table video.

Watch Autonomous Low Pwr Vehicle Inertial Nav Assembly video.

Watch Inertial Nav (GPS/INS) Testing on a Roller Coaster video.

Watch Ardupilot Rover Inertial Nav video.

Watch Can We Navigate Without GPS or Quantum Tech? video.

Watch The Incredible Speed and Accuracy of ATACMS Ballistic Missiles video.

Watch Probabilistic Map Matching for Robust Inertial Navigation Aiding | RTCL.TV video.

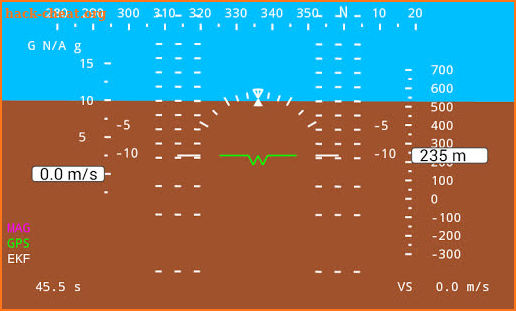
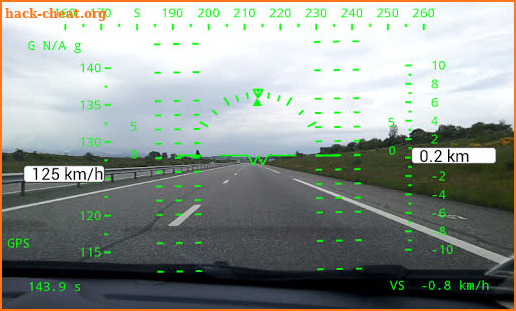
InertialNav Apk is a toolbox for inertial navigation. It uses info from sensors (e.g. accelerometer, gyroscope, magnetometer, and GPS), when accessible, to derive attitude, position and velocity information. Recent ways are used in InertialNav Apk to provide reliable and robust attitude estimation. InertialNav Apk can provide an attitude estimation that is, in average, unbiaised by local accelerations, taking the most from low-grade sensors generally accessible in handset and tablets. It contains the following instruments: ✔ artificial horizon / gyro attitude indicator, ✔ altimeter, ✔ 3D compass (gyro, magnetic) that works in every orientations, ✔ speed meter (ground speed, vertical speed), ✔ ground track. An optimal filter is used to estimate as accurately as possible attitude and position of the device. Bear in mind, though, that phones usually have low-quality sensors. In addition: ✔ A HUD mode allows using the application for augmented reality. ✔ You can display a Google Map for your position, ✔ You can monitor the sensors in your Android device device, ✔ You can shop real-time measurements and estimations into GPX file (GPS measures only), text files or, send these measurement over a wireless connection internal network with UDP, for post-processing (e.g. into MATLAB, SciLab, LabView, ...). ✔ complete set of options let you to ok tune the apks to your particular needs. If a feature is missing, do not hesitate to ask! HOW DOES IT WORK? In true life environment, sensors tend to measure noises in addition to the physical quantity of interest. The current application provides an estimate of the attitude. To have the best estimation of the attitude an data fusion (EKF, UKF) is used. The filter purpose is to reject all perturbations, but to do so efficiently, it needs various sources of measurments. Considering we are interested by the orientation, and your device is indeed an inertial measurement unit (IMU with gyroscopes, accelerometers and so on), using gyroscopes for angular velocity and a set of measurements from accelerometers and magnetometers, InertialNav can indeed estimate the attitude with the filter. That is, to estimate the attitude, InertialNav will sometimes discard info from the sensors that it deems unreliable or too noisy - it may sometimes favour the attitude measurements rather than the angular velocity integration and vice versa - to minimise the covariance of the error. Furthermore, quaternion formulation for the orientation makes the estimation very robust. Additionally, if GPS is accessible, sub-meter positioning can be obtained. That is, this can not work efficiently indoors (drift in position and velocity). ** IMPORTANT ** : depending on your device, please consider going through the covariance settings for best estimation of the attitude! InertialNav may disregard the measurements if deemed unreliable. If YOU THINK the apk does not use the gyroscopes, please CHECK the variance settings for the gyroscopes. OUTPUTS Data can be saved as a text file on the SD card. Data can also be send over UDP local wireless connection network. Data are send as float (4 bytes, Tiny endian), as following: [time, Measured Acceleration {X, Y, Z}, Measured Orientation {Pitch, Roll, Yaw}, Magnetic Field {X, Y, Z}, Pitch Estimate, Roll Estimate, Yaw Estimate] MINIMUM REQUIREMENTS Minimum requirements: accelerometers, gyroscopes, magnetometers. Optional requirements: GPS, camera. - Groundtrack mode will only be accessible when GPS is enabled, - HeadUp Display will only be accessible when a camera is accessible, - Multiple panels only accessible for 7" and above screen size. The application is provided as-is, without any warranty. The application is not certified for navigation purposes by any agency or organisation. It could not be used as navigation instrument in a plane! If you search bugs, please report them by email. Thanks!

 SkeuoNotes
SkeuoNotes
 ROC the Block
ROC the Block
 Nelsonville Music Fest
Nelsonville Music Fest
 Planet Bluegrass Festivarian
Planet Bluegrass Festivarian
 Slice Squad robux
Slice Squad robux
 JoyVibe-Chat&Match
JoyVibe-Chat&Match
 Aung Bar Lay သိန်းဆုထီ
Aung Bar Lay သိန်းဆုထီ
 Clap to Find My Phone
Clap to Find My Phone
 Calcverto:Smart-Unit-Brain
Calcverto:Smart-Unit-Brain
 FlexCalc-Smart-Converter
FlexCalc-Smart-Converter
 Fifth Grade Learning Games Hacks
Fifth Grade Learning Games Hacks
 Helix Jumping Hacks
Helix Jumping Hacks
 Forte Craft 2 : Exploration Survival Hacks
Forte Craft 2 : Exploration Survival Hacks
 Craft Adventure Ultimate Run Hacks
Craft Adventure Ultimate Run Hacks
 code kof 2002 king of fighter 2002 Hacks
code kof 2002 king of fighter 2002 Hacks
 Gun Blood Cowboy Duel Hacks
Gun Blood Cowboy Duel Hacks
 Beast Human Fighting: Flat Fall on Floor Hacks
Beast Human Fighting: Flat Fall on Floor Hacks
 1849: Gold Edition Hacks
1849: Gold Edition Hacks
 World War 3 III Euro Battles Hacks
World War 3 III Euro Battles Hacks
 Bloxnite map for MCPE Hacks
Bloxnite map for MCPE Hacks
Share you own hack tricks, advices and fixes. Write review for each tested game or app. Great mobility, fast server and no viruses. Each user like you can easily improve this page and make it more friendly for other visitors. Leave small help for rest of app' users. Go ahead and simply share funny tricks, rate stuff or just describe the way to get the advantage. Thanks!
Welcome on the best website for android users. If you love mobile apps and games, this is the best place for you. Discover cheat codes, hacks, tricks and tips for applications.
The largest android library
We share only legal and safe hints and tricks. There is no surveys, no payments and no download. Forget about scam, annoying offers or lockers. All is free & clean!
No hack tools or cheat engines
Looking for cheat or hack for any game? No problem, our www service offers thousands of hacks, promo codes, solutions and strategies. Find the best tactics and win matches quickly! Read and use only confirmed and legal tutorials. Share your own experience and leave a feedback.

No register! Use our website with no limit and no payments. Search apps, write questions and answers.
Find easter egg, code, hint, trick and fix for your favourite and most played apps or games.
Reviews and Recent Comments:

Tags:
InertialNav cheats onlineHack InertialNav
Cheat InertialNav
InertialNav Hack download